8: Node("motion_capture"),
12{
14
15 subscription_ = this->create_subscription<sensor_msgs::msg::PointCloud2>(
18
21
24
27
28 timer_ = this->create_wall_timer(
31
32 RCLCPP_INFO(this->get_logger(), "MotionCapture node initialized.");
33}
rclcpp::Publisher< geometry_msgs::msg::Vector3 >::SharedPtr acceleration_publisher_
ROS2 publisher to send the calculated object acceleration.
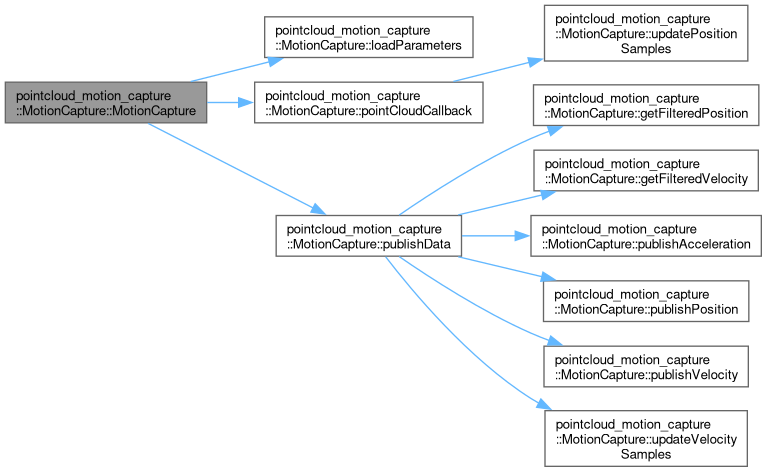
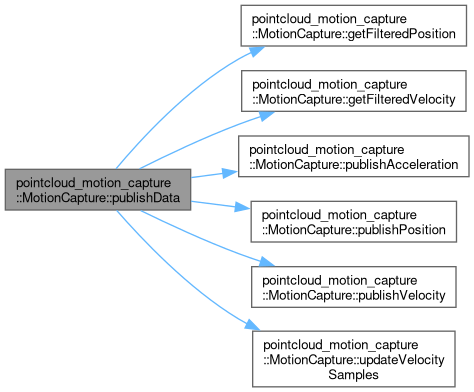
void publishData()
Publishes the calculated position, velocity, and acceleration.
Eigen::Vector4f previous_position_
The previous position of the object in 3D space.
std::string acceleration_publish_topic_
Topic name for publishing the calculated acceleration of an object.
void loadParameters()
Loads parameters from the ROS2 parameter server.
rclcpp::Time previous_time_
The timestamp of the previous position sample.
rclcpp::Publisher< geometry_msgs::msg::Vector3 >::SharedPtr velocity_publisher_
ROS2 publisher to send the calculated object velocity.
std::string point_cloud_topic_filtered_
Topic name for subscribing to filtered point cloud data.
double kMillisecondsPerSecond
Conversion factor from seconds to milliseconds.
int queue_size_
Queue size for message publishers and subscriptions.
rclcpp::TimerBase::SharedPtr timer_
Timer used for scheduling the publication of data.
Eigen::Vector3f previous_velocity_
The previous velocity of the object in 3D space.
rclcpp::Subscription< sensor_msgs::msg::PointCloud2 >::SharedPtr subscription_
ROS2 subscription to receive PointCloud2 messages.
void pointCloudCallback(const sensor_msgs::msg::PointCloud2::SharedPtr msg)
Callback function for processing incoming PointCloud2 messages.
std::string velocity_publish_topic_
Topic name for publishing the calculated velocity of an object.
rclcpp::Publisher< geometry_msgs::msg::Point >::SharedPtr position_publisher_
ROS2 publisher to send the calculated object position.
rclcpp::Time previous_velocity_time_
The timestamp of the previous velocity sample.
std::string position_publish_topic_
Topic name for publishing the calculated position of an object.
double publish_rate_
Publish rate for sending position, velocity, and acceleration data.